A vehicle is a network of networks
Once a car moves beyond a handful of electronic modules, architecture stops being about one bus and becomes about coordination between many buses. A modern vehicle may contain:
- High-priority control traffic
- Low-cost peripheral traffic
- Diagnostics and flashing traffic
- Sensor and logging traffic
- Cross-domain gateway traffic
- Traffic between centralized compute and zonal controllers
That diversity is why modern automotive networking is layered rather than uniform. CAN, CAN FD, LIN, FlexRay, and Automotive Ethernet each grew around a different system need.
Start with the ECU
An ECU is an electronic control unit: a controller responsible for a defined function such as braking, steering, door modules, battery management, lighting, HVAC, body electronics, or central vehicle coordination.
Bosch and other suppliers now also use terms like vehicle control unit and zone ECU to describe more centralized and aggregated controllers. The naming tells the story of the architecture shift:
- Older architectures distribute many narrow-function ECUs across the car.
- Newer architectures consolidate functions into domain controllers, central compute nodes, and zonal controllers.
Either way, the networking problem remains. The controllers still have to exchange state, commands, diagnostics, and software-management data.
Why several vehicle buses exist at the same time
Each bus solves a different engineering problem.
CAN and CAN FD
Best when:
- The traffic is mainly control and status data
- Messages are small or medium sized
- Deterministic priority matters
- A robust, well-understood shared bus is desirable
Typical roles:
- Powertrain
- Chassis
- Body control
- Battery systems
- Gateway links between subsystems
LIN
Best when:
- Cost matters more than bandwidth
- The node is simple and peripheral
- Traffic is predictable and less timing-critical
Typical roles:
- Seat modules
- Mirror adjustment
- Door and window sub-functions
- Simple sensors and actuators
FlexRay
Best when:
- Deterministic time-triggered communication is central
- Higher performance than classical CAN is needed
- The system was designed around a stricter synchronized schedule
Typical roles:
- Historically used in selected high-end chassis and safety-related domains
Automotive Ethernet
Best when:
- Bandwidth requirements rise sharply
- Switching and backbone aggregation matter
- IP-based or service-oriented software architectures become important
- ADAS, infotainment, logging, and central compute need more headroom
Typical roles:
- Backbones and gateways
- Domain or zonal interconnects
- Camera and sensor aggregation
- Centralized software-defined vehicle platforms
What a gateway actually does
A gateway ECU is more than a protocol translator. It is the traffic manager between vehicle domains. In practice, it may:
- Route traffic from one bus to another
- Enforce diagnostic access boundaries
- Filter and normalize messages
- Bridge CAN, CAN FD, LIN, and Ethernet segments
- Support software download or update flows
- Concentrate cybersecurity and policy enforcement
TI positions automotive gateways around CAN and Ethernet because that is where many vehicles now need bridging: control networks still live on CAN, but data-heavy or centralized architectures increasingly lean on Ethernet.
Why Ethernet is growing fast without replacing everything
Automotive Ethernet brings real advantages:
- Higher bandwidth
- Switched topologies instead of one shared bus everywhere
- Natural compatibility with IP-based services
- Better fit for central compute, zonal design, and ADAS data movement
- TSN options for more controlled timing behavior
NXP's automotive switch portfolio and TI's gateway reference designs both point in the same direction: Ethernet is becoming the backbone for larger data movement and centralized coordination.
But Ethernet does not erase the value of CAN. If a branch network only needs to coordinate actuators, relay statuses, and a few control loops, CAN or CAN FD is often the more proportionate answer.
The shift from distributed ECUs to zonal architectures
This is one of the most important current trends in vehicle electronics.
In a traditional distributed architecture:
- Many ECUs are placed near the functions they control
- Harnessing can become complex as cross-vehicle connections multiply
- Each ECU may own a narrow feature set
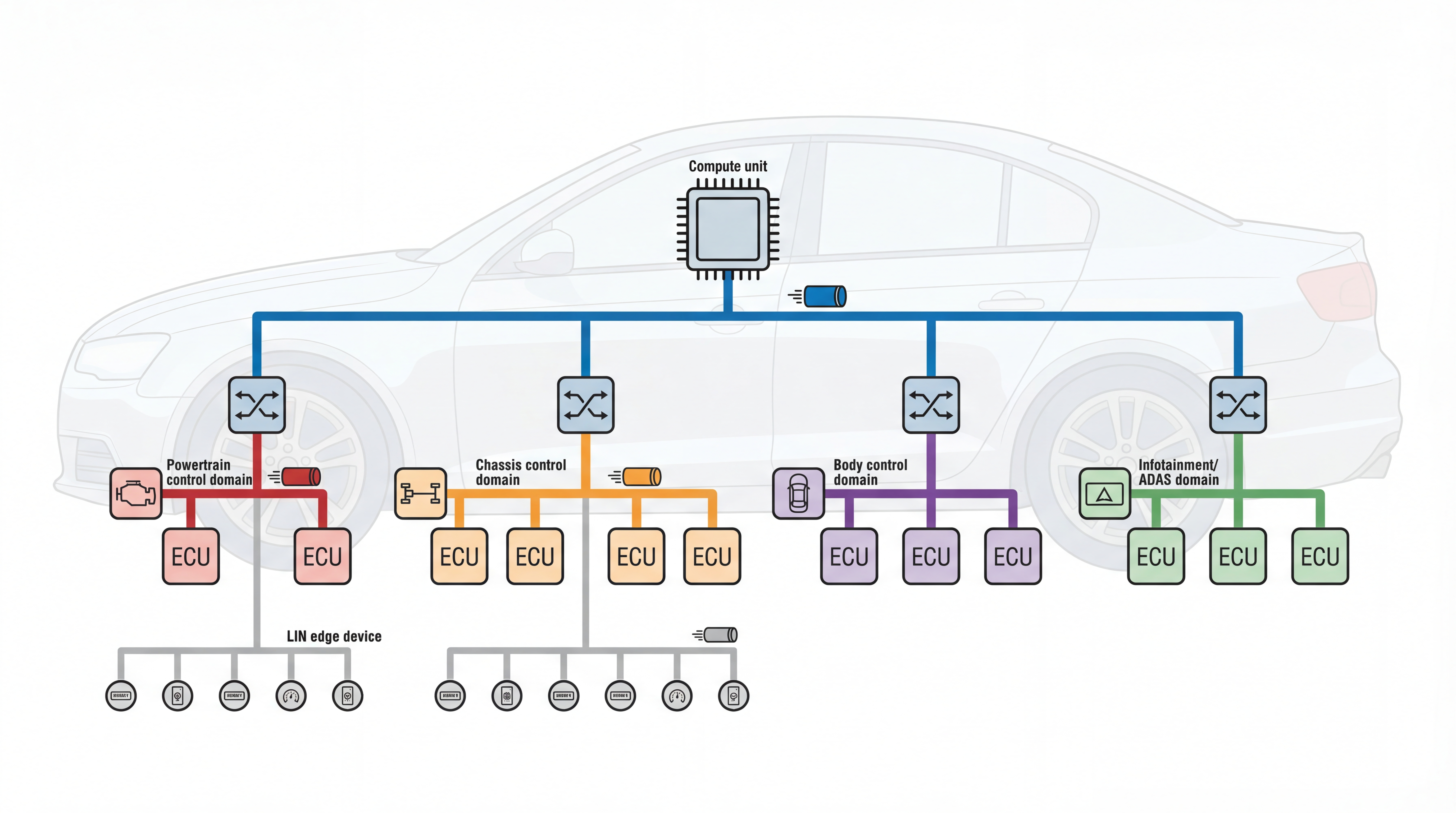
In a zonal architecture:
- Functions are grouped by physical area or aggregated through zone controllers
- A faster backbone links these zones to central compute
- Wiring can become cleaner because local devices connect into nearby zones
Bosch's Zone ECU positioning reflects this move. Ethernet becomes more valuable in the backbone, while CAN, CAN FD, or LIN can still exist at the edge depending on the device class.
A practical architecture view
The most realistic current answer is not "everything becomes Ethernet." It is usually:
- Ethernet for backbone and high-bandwidth domains
- CAN FD for rich control domains that outgrew classical CAN
- Classical CAN where the traffic remains light and predictable
- LIN for low-cost edge devices
This mixed approach reduces risk because it lets engineers match the transport to the signal class rather than forcing one network to serve every job poorly.
Where DBC files remain important
DBC files are closely associated with CAN and CAN FD because those buses rely heavily on external databases to describe message semantics. Even in vehicles that adopt Ethernet backbones, CAN databases remain critical for:
- Gateway translation logic
- ECU validation and debugging
- Fleet logging and trace interpretation
- Service-tool diagnostics
- Regression testing on legacy and mixed architectures
That matters for tooling strategy. A team can modernize vehicle architecture and still spend significant daily time managing CAN database definitions.
The cleanest way to think about modern vehicle communication
Think in layers:
- Edge devices need low-cost, local communication.
- Control domains need deterministic, robust exchange.
- Backbones need bandwidth and aggregation.
- Gateways connect these worlds while enforcing policy and translation.
Once you think in layers, the coexistence of LIN, CAN, CAN FD, and Ethernet stops looking messy and starts looking intentional.
Final view
Modern vehicles are not abandoning CAN because Ethernet exists. They are reorganizing where each technology belongs. CAN remains vital in control-oriented zones. Ethernet becomes more important in centralized and high-bandwidth paths. Gateways and zone controllers are the bridge between those worlds, and ECU software still depends on clear message databases to keep the whole system understandable.